










 WORKNC Robot Usinage
WORKNC Robot Usinage
WORKNC intègre le module WORKNC Robot pour la simulation et l’édition de parcours d’outils pour piloter tout type de robot. WORKNC Robot
bénéficie de toutes les stratégies de WORKNC pour des opérations d'usinage, de durcissement d'arêtes, de soudure et de polissage.
La simulation des trajectoires dans l’environnement complet de la cellule garantit un résultat sans collision prenant en compte les spécificités et les contraintes des robots.
En quelques mots
|
|
Facile à utiliser
L’interface utilisateur graphique de WORKNC Robot offre une programmation aisée, rapide et précise permettant de réaliser des parcours complexes, pour tout type de matériaux et de machines. Cette méthode de programmation simple permet aux fabricants d’exploiter au mieux le potentiel de leur robot.
Toutes les stratégies ( 3, 3+2 ou 5 axes continus) de WORKNC peuvent être utilisées afin de répondre à tous les moyens de fabrications disponibles dans l’atelier tels que le fraisage, le découpage de pièces...
WORKNC Robot remplace le mode d’apprentissage point par point pour le détourage de pièce.
Des besoins particuliers
Aujourd’hui, WORKNC Robot fournit des solutions dans des domaines autres que l’usinage.
Le durcissement d’arêtes, pour les outils d’emboutissages pilotés par WORKNC, permet d’automatiser ce procédé souvent effectué manuellement et de commander des têtes laser montées sur fraiseuse CN ou robot.
WORKNC Robot génère des trajectoires sur des formes géométriques complexes (mesh STL ou Surfaces nurbs) personnalisables pour la soudure par laser ou par torche.
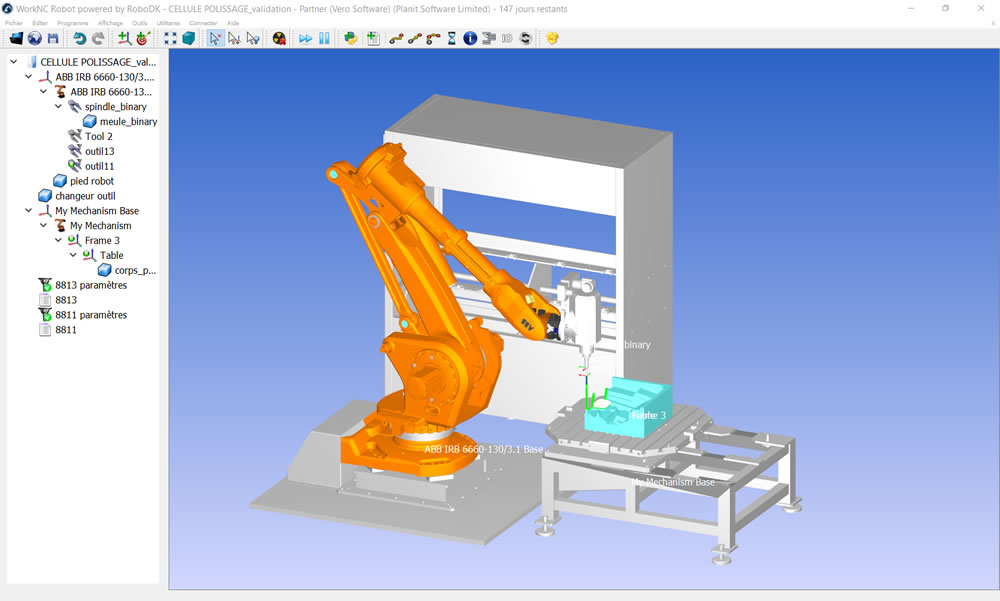
Simulation
Les mouvements « complexes » du robot nécessitent un modèle CAO précis de la cellule afin de détecter d’ éventuelles collisions entre les différents éléments tels que le robot, l’armoire du changeur outil, la table ou autres supports, les axes supplémentaires et les barrières de sécurité.
Optimisation des trajectoires - Singularité
Les trajectoires peuvent générer des problèmes de singularités du poignet ou du bras du robot. WORKNC Robot peut détecter en automatique les trajectoires qui incluent des mouvements proches des singularités et en avertir l’opérateur afin de prendre les mesures appropriées.
Le Moniteur de simulation contenu dans l’application Robot permet l’optimisation des mouvements du robot.WORKNC robot propose des configurations ou positions complémentaires du robot assurant une trajectoire plus optimisée.
Une haute précision des trajectoires est la garantie d’une qualité élevée du produit fini.
Différents procédés ou configurations de la cellule
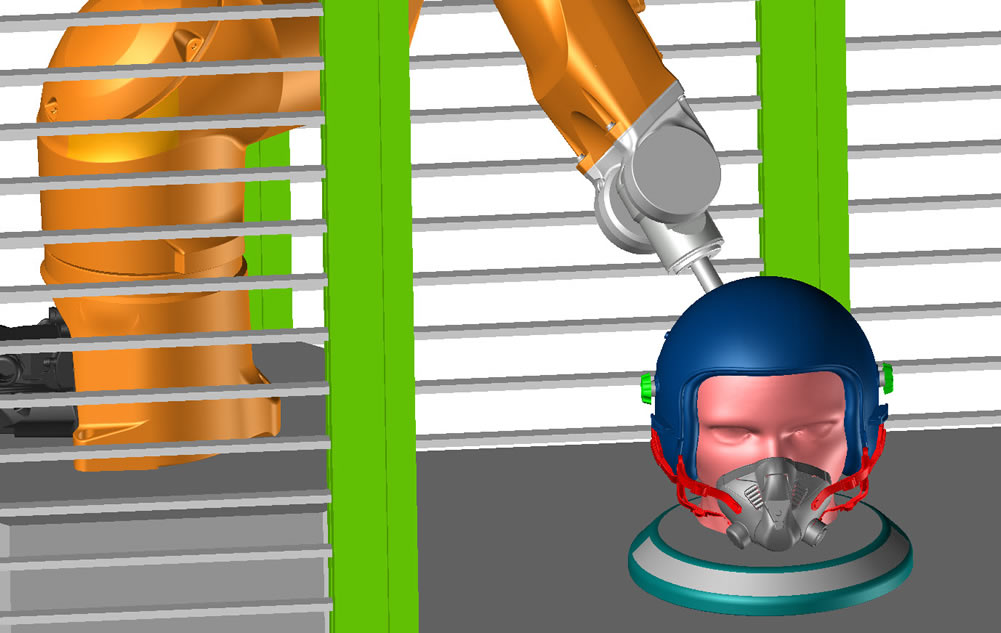
Outil porté
La configuration de la cellule en outil porté va permettre de réaliser des usinages ou applications de procédés divers sur des pièces de grandes dimensions et des pièces massives.
Ce procédé permet l’utilisation d’outils ou postes de travail différents accessibles par le robot à l’aide d’un chargeur d’outils. Plusieurs outils peuvent être positionnés en même temps sur la tête du Robot.
Pièce portée
WORKNC robot propose ce type de configuration pour des solutions de production, avec des pièces « légères » limitées par les capacités du robot.
Ce procédé permet de piloter des cellules automatisées depuis l e chargement du brut sur un tapis roulant jusqu’ à usinage complet de la pièce et son dépôt par le robot sur le tapis roulant.
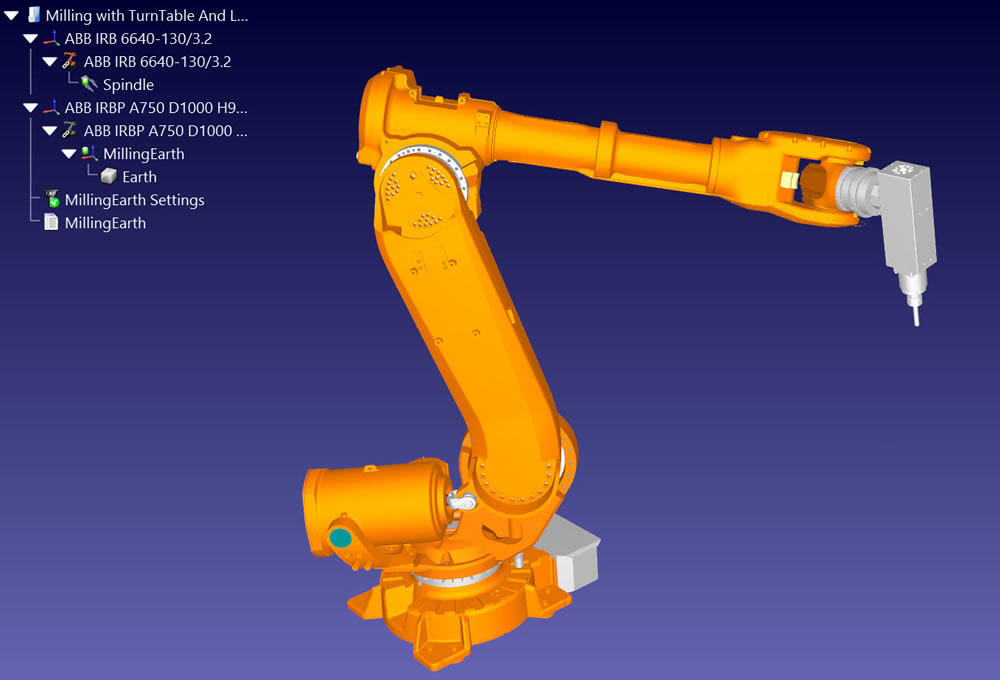
Cinématique
WORKNC Robot pilote tout type de robot, de 4 à 7 axes ainsi que des axes supplémentaires comme une table tournante, un robot sur rail, un portique avec 3 axes linéaires, etc…
WORKNC Robot propose une librairie de plus de 250 machines de 22 fournisseurs différents.
Robots pilotés
WORKNC Robot s’adapte à toutes les marques de robots
Le postprocesseur de WORKNC Robot, configurable suivant le moyen de production, crée des programmes qui pilotent tout type de robot, prenant en compte la totalité des paramètres grâce à un simulateur spécifique à chaque contrôleur :
- STAUBLI (VAL3, Version 6 & 7)
- ABB
- FANUC
- YASKAWA_Motoman
- KUKA
- …..